|
АкушерствоАнатомияАнестезиологияВакцинопрофилактикаВалеологияВетеринарияГигиенаЗаболеванияИммунологияКардиологияНеврологияНефрологияОнкологияОториноларингологияОфтальмологияПаразитологияПедиатрияПервая помощьПсихиатрияПульмонологияРеанимацияРевматологияСтоматологияТерапияТоксикологияТравматологияУрологияФармакологияФармацевтикаФизиотерапияФтизиатрияХирургияЭндокринологияЭпидемиология |
Динамическая система станка и ее особенности(Гельфанд Б.Р. и соавт. 2007г)
Хирургическая инфекция. Учебно-методическое пособие для студентов медицинских ВУЗов, обучающихся по специальности лечебное дело / Под редакцией Чернядьева С.А. Екатеринбург, 2010. – 186с.
Рекомендовано к изданию заседанием ЦМК № 2(от 23.12.2010) по плану выпуска 2010.
Редактор: Кривонищенко В.В.
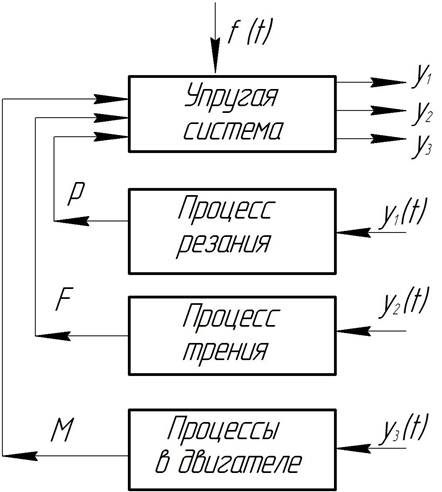
I. Динамика станков Динамическая система станка и ее особенности Динамическая система станка образуется совокупностью упругой системы и рабочих процессов в их взаимодействии. Упругая система (УС) включает в себя станок, приспособление, инструмент, заготовку (СПИЗ). Рабочие процессы – резание, трение, процессы в двигателях (электромагнитные, аэро- или гидродинамические и др.). УС и рабочие процессы – резание, трение и процессы в двигателях являются основными элементами динамической системы станка. Воздействие рабочих процессов на УС является главным образом силовым, но может быть и другим, например, тепловым. 1. Воздействия на УС вызывают смещения ее конструктивных элементов, т.е. изменяют взаимное положение деталей, образующих подвижно соединение (резца и заготовки, суппорта и направляющих, ротора и статора и т.п.), в котором протекает тот или иной процесс. 2. Воздействия на УС на рабочие процессы выражается в изменении их основных параметров: сечение среза, нормального давления на поверхностях трения, скорости движения и т.п. Это воздействие вызывает изменение сил, количество выделяемого тепла и т.п. Иначе говоря, силы и другие воздействия рабочих процессов на УС являются функциями координат (или их производных) упругой системы, т.е. так называемыми внутренними силами и воздействиями. Эта зависимость выражает обратное воздействие УС на рабочие процессы. Пренебрегая обратным воздействием УС на рабочие процессы, в практике часто рассматривают только воздействие рабочих процессов на УС. В этом случае воздействия, в частности, силы являются внешними по отношению к системе и могут быть постоянными или изменяться во времени. На рис.1.1 дана условная схема воздействия рабочих процессов на УС для этого случая. Каждому процессу и УС соответствует свой прямоугольник. Воздействия показаны в виде стрелок. Кроме рабочих процессов на УС оказывают воздействие силы инерции неуравновешенных вращающихся деталей или узлов, совершающих возвратно-поступательное движение; силы веса узлов и заготовок, усилия закрепления деталей системы; тепловые источники и, наконец, толчки и колебания, передаваемые извне через фундамент или возникающие в самой системе из-за неточности зацепления зубчатых колес и иных погрешностей изготовления деталей и сборки станка. Эти воздействия практически всегда могут рассматриваться как внешние воздействия на УС; на рис.1.1 они обозначены f(t). Внешние воздействия на рабочие процессы выражаются в заданном изменении припуска обрабатываемой заготовки; в заданном изменении давления смазки, подаваемой на направляющие; в заданном изменении электрического напряжения, подводимого к электродвигателю и т.п.; воздействия обозначены y(t) с индексом, соответствующим рабочему процессу. Внешние воздействия на рабочие процессы удобно называть изменением настройки этих процессов или системы. Пренебрежение обратным воздействием УС на рабочие процессы допустимо только в редких случаях и лишь после тщательного анализа несущественности этого воздействия. Обратное воздействие УС на рабочие процессы принципиально меняет характер динамических явлений в станках. На рис.1.2 приведена схема динамической системы станка, на которой обратное воздействие показано стрелками. В таком виде схема динамической системы станка напоминает схему системы автоматического регулирования, отличаясь от нее тем. Что связи не создаются искусственно, а являются следствием особенностей взаимодействия упругой системы и рабочих процессов.
Рис.1.1. Схема незамкнутой динамической системы станка
Воздействия рабочих процессов на УС и обратные воздействия УС на процессы назовем связями, цепь воздействия, включающая элементы и связи между ними – контуром связи. В соответствии с изложенным контур связи может быть замкнутым и незамкнутым. Физическую величину, описывающую воздействие на данный элемент или систему, будем называть входной координатой
Рис.1.2. Схема замкнутой динамической системы станка
Сложные нелинейные динамические системы станков во многих случаях удается привести к более простому виду линейных систем с сосредоточенными параметрами. Уравнение такой замкнутой линейной (линеаризованной) системы при наличии внешнего воздействия f(t) и изменения настройки y(t) относительно выходной координаты
где
где Решение уравнения
где Коэффициенты операторных многочленов определяются свойствами упругой системы и рабочих процессов, а также их связями. Анализ связей в динамических системах станков позволяет выделить следующие основные особенности этих систем: 1. Динамическая система станка является замкнутой, многоконтурной системой, включающей источник энергии (т.е. так называемой активной системой). 2. Воздействия основных элементов системы могут рассматриваться как направленные. 3. Взаимодействия между рабочими процессами происходят только через упругую систему. Первая особенность вытекает из факта взаимодействия УС рабочих процессов и может быть проиллюстрирована большим числом примеров. Приведем некоторые из них. 1. УС деформируется силой резания. Деформация дает изменение относительного положения инструмента и заготовки, что влечет за собой изменение сечения среза. Соответствующее изменение силы резания отражается на величине деформации УС и т.д. 2. Сила трения, не совпадающая с осью винта подачи каретки, вызывает перекос каретки и деформацию винта. При этом изменяется составляющая силы трения на боковых поверхностях направляющих, что влечет за собой изменение деформации перекоса. И т.д. 3. Момент электродвигателя, преодолевая силы сопротивления и деформируя УС, сообщает узлам станка некоторую скорость движения. Изменение скорости движения влечет за собой изменение момента, особенно у электродвигателя с «мягкой» механической характеристикой. Это, в свою очередь, вызывает изменение скорости движения и т.д. Введение общего представления о замкнутости системы является основным в динамике станков. Это представление, заложенное в ряде фундаментальных наук, в частности в теоретической механике, применительно к задачам динамики станком позволяет обобщить имеющиеся результаты и получить принципиально новые решения. Известны следующие основные отличия замкнутой системы от незамкнутой. 1. Незамкнутая система, состоящая из неустойчивых элементов, - неустойчива; состоящая из устойчивых элементов – устойчива. Замкнутая система, состоящая из устойчивых элементов, может оказаться неустойчивой и, наоборот, при наличии неустойчивых элементов – оказаться устойчивой. 2. Замкнутая система совершенно иначе реагирует на внешние возмущающие воздействия, чем незамкнутая. Замкнутость системы учитывается в имеющихся работах главным образом при решении задач устойчивости движения в станках. Вторая особенность динамической системы станка является свидетельством большей или меньшей простоты системы и означает, что воздействия одного элемента на другой не сопровождается обратным воздействием иного вида, чем учитываемое в данном контуре связи. Если рассматривать раздельно конструктивные элементы станка, например «виброустойчивость» шпинделей, то ошибочность этого стремления вытекает из того, что элементы УС не могут быть практически представлены как элементы с направленными связями из-за сложности и существенности этих связей между всеми элементами УС. Дата добавления: 2015-01-18 | Просмотры: 2239 | Нарушение авторских прав |
 элемента или системы; результат воздействия – выходной координатой
элемента или системы; результат воздействия – выходной координатой  .
.
 , (1.1)
, (1.1) - символ дифференцирования; a, b и c – коэффициенты операторных многочленов, или
- символ дифференцирования; a, b и c – коэффициенты операторных многочленов, или , (1.2)
, (1.2) - операторные многочлены.
- операторные многочлены. , (1.3)
, (1.3) - общее решение однородного уравнения
- общее решение однородного уравнения  описывает установившееся состояние.
описывает установившееся состояние.