|
АкушерствоАнатомияАнестезиологияВакцинопрофилактикаВалеологияВетеринарияГигиенаЗаболеванияИммунологияКардиологияНеврологияНефрологияОнкологияОториноларингологияОфтальмологияПаразитологияПедиатрияПервая помощьПсихиатрияПульмонологияРеанимацияРевматологияСтоматологияТерапияТоксикологияТравматологияУрологияФармакологияФармацевтикаФизиотерапияФтизиатрияХирургияЭндокринологияЭпидемиология |
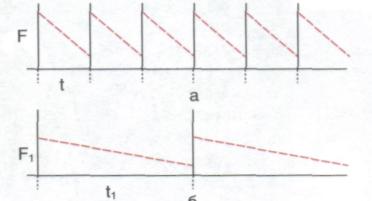
Общая характеристика ортодонтических аппаратовСреди различных методов исправления зубочелюстных аномалий аппаратурное лечение занимает основное место. Аппаратура, применяемая в ортодонтии, делится на: 1) механически действующую, функционально направляющую (действующую) и комбинированную; 2) съёмную и несъёмную; 3) одночелюстную и межчелюстную; 4) внутриротовую и внерото-вую; 5) активно действующую, или исправляющую, и ретенционную или удерживающую. Сущность применения аппаратов состоит в непрерывном или прерывистом воздействии на зубы, альвеолярные отростки и челюстные кости с помощью специальных приспособлений. Чтобы ортодонтические аппараты развивали силу давления или тяги на определённый участок жевательного аппарата, необходимо при их конструировании создать адекватные точку опоры и точку приложения силы. В процессе терапии механическая сила аппарата или преобразованная им сократительная способность мышц вызывают тканевую перестройку, определяющую изменение формы. Точка опоры должна быть значительно устойчивее той части зубочелюстной системы, которая подлежит перемещению. По законам механики опора, как более устойчивая часть аппарата, должна оставаться на месте, а объект в точке приложения силы (как менее устойчивый элемент) может перемещаться. Если же точка опоры и точка приложения силы будут одинаковой устойчивости, то возникнет реципрокная реакция, т.е. взаимодействие сил: обе точки перемещаются в одинаковой мере, но в противоположном направлении. Первый принцип конструкции ортодонтических аппаратов используется при перемещении отдельных зубов или их групп, второй — при расширении челюстей, лечении диастем, межчелюстном вытяжении. В качестве опоры могут быть использованы отдельные группы зубов (блокируются при помощи капп, коронок, колец, кламмеров, лигатурного связывания), весь зубной ряд, а также альвеолярная дуга и нёбный свод (при конструировании съёмных аппаратов). Точка опоры и точка приложения силы расположены на одной челюсти — одночелюстной аппарат (любая вестибулярная или лингвальная дуга), на обеих челюстях — межчелюстной аппарат (аппараты с косой межчелюстной эластичной тягой). Внутриротовой — любой аппарат, в котором точки опоры и приложения силы находятся внутри полости рта. Внерото- вой аппарат — точки опоры и приложения силы находятся вне полости рта, например, при лечении прогении (мезиальный прикус) подбородочная праща укрепляется к головной шапочке (точка опоры), а подбородок является точкой приложения силы. 138 Глава 5- Характеристика основных видов ортодонтических аппаратов... Механически действующими аппаратами называют такие, в самой конструкции которых заложен источник силы. Поэтому их называют ещё активными, поскольку действующую силу развивают непосредственно сами аппараты. Источником силы может быть упругость дуг и пружин, сила винта, эластичность резиновой тяги, лигатуры для фиксации зубов к дуге. Сила, развиваемая этими аппаратами, регулируется (дозируется) врачом лишь на основе его клинического опыта, так как нет объективных критериев, характеризующих индивидуальные особенности периодонта. Аппараты функционально действующие или направляющие не имеют собственного источника силы, т.е. в них не заложено никаких активно действующих элементов. Источником силы при использовании таких аппаратов является сократительная способность жевательных или мимических мышц. В аппаратах же всегда есть определённое устройство (чаще всего наклонная плоскость, накусочная площадка, щёчные или губные пелоты, бамперы и т.д.), которое направляет действие мышц в нужную для лечения сторону. Эти аппараты действуют прерывисто. Основоположник функционального направления при лечении зубочелюстных аномалий в нашей стране А.Я.Катц (1933), предложив впервые аппарат такого действия, высказал мысль, что величина силы при этом регулируется рецепторами периодонта. Иными словами, функционально направляющий аппарат может действовать только до определённого предела, а когда сила становится чрезмерной, возникает боль, и сокращение мышц рефлекторно ослабляется или прекращается. Такое регулирование силы действия ортодонтического аппарата (величина её в зависимости от индивидуальных особенностей и реактивности периодонта) должно, казалось бы, предотвратить патологические изменения. Однако экспериментальные и клинические исследования показали, что и при использовании функционально действующих аппаратов могут быть тяжёлые тканевые преобразования, выходящие за пределы нормальных реакций. Существуют различные функционально действующие аппараты, съёмные и несъёмные. Большинство из них представлены при описании конкретной нозологической формы. При действии ортодонтических аппаратов различают два разных вида силы — перемежающуюся и постоянно действующую. Перемежающаяся сила характеризуется тем, что аппарат периодически, через определённые промежутки времени активируется и сила действует толчками, имея большую величину сразу после активации, которая в скором времени снижается или «затухает». Источником такой силы может быть аппарат с винтами или лигатурой, и графически её действие можно выразить следующим образом (рис. 143, а): F — действующая сила, t — период действия аппарата при каждой активации. Источником постоянной силы может быть дуга, пружина, резиновая тяга, и действие их является более или менее равномерно продолжительным (рис. 143, б), хотя с течением времени тоже постепенно ослабевает. Во-первых, из-за постепенной, хотя и медленной потери упругости металла или набухания резины, во-вторых, по мере ортодонтического лечения происходит перемещение зуба, изменение формы челюсти, и вследствие этого расстояние между точками опоры и приложения силы увеличивается. Следовательно, действие такой силы тоже характеризуется определённой, хотя и не резко выраженной периодичностью. В начале периода действия сила Fi имеет незначительную величину и длительно её сохраняет (ti), но всё-таки с постепенным, медленным угасанием. Сравнительный анализ представленных графиков (рис. 143) позволяет заключить, что между перемежающей силой и постоянной нет принципиальной разницы. При перемежающем характере величина силы (F) больше, но период действия (t) более короткий. Постоянно действующая сила характеризуется весьма слабой первоначальной силой (Fi), но продолжительным периодом действия (ti). Математически это можно выразить следующим образом: F > Fi, t < ti. Кроме механически и функционально действующих аппаратов, применяются и комбинированные конструкции, содержащие в себе элементы тех и других. Классическим представителем таких аппаратов можно считать лечебно-накусочную пластинку А.Я.Катца, аппарат Брюкля. К комбинированным конструкциям относят и активаторы (в немецкой ли- 52. Биомеханика ортодонтического перемещения зубов..
Рис. 143. Графическое изображение действия сил ортодонтических аппаратов: а — при перемежающейся силе, 6 — при постоянно действующей силе. тературе они известны под названием функциональных челюстно-ортопедических аппаратов), регуляторы функции различных конструкций. Комбинированными аппаратами называют также сочетание внутриротовых конструкций с внеротовыми, например, всевозможные комбинации внутриротовых и лицевых дуг при проведении эджуайз-терапии. Дата добавления: 2015-11-26 | Просмотры: 877 | Нарушение авторских прав |