|
АкушерствоАнатомияАнестезиологияВакцинопрофилактикаВалеологияВетеринарияГигиенаЗаболеванияИммунологияКардиологияНеврологияНефрологияОнкологияОториноларингологияОфтальмологияПаразитологияПедиатрияПервая помощьПсихиатрияПульмонологияРеанимацияРевматологияСтоматологияТерапияТоксикологияТравматологияУрологияФармакологияФармацевтикаФизиотерапияФтизиатрияХирургияЭндокринологияЭпидемиология |
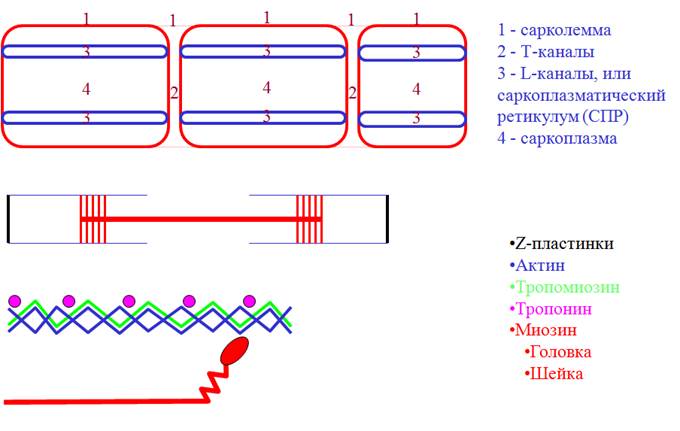
Скелетная мускулатураФункциональная организация скелетной мускулатуры - двигательные единицы (ДЕ) • ДЕ – один мотонейрон и группа иннервируемых им мышечных волокон. • Чем меньше волокон в одной ДЕ, тем более тонкое движение можно совершить. • По лабильности ДЕ: • быстрые (длительность ПД от 1 мс, высокая скорость сокращения, гидролиза и ресинтеза АТФ) • медленные (длительность ПД до 10-15 мс, низкая скорость сокращения, гидролиза и ресинтеза АТФ). Механизм мышечного сокращения
• Распространение ПД по Т-каналам ® деполяризация СПР ® выход Са2+. • Са2+-тропонин ® сдвиг тропомиозина ® открытие центров связывания головки миозина на актине. • Соединение головки миозина с актином ® жесткость (ригидность) мышцы. • АТФ-азная активность головки миозина ® гидролиз АТФ ® гребковое движение (генерация усилия). • Присоединение новой молекулы АТФ к миозиновой головке ® разрыв поперечного мостика (исчезновение ригидности). • Присоединение головки миозина к другому центру актина. • Активация Са-АТФазы СПР фосфатом (гидролиз АТФ) ® возврат Са2+ обратно ® расслабление мышцы.
Регуляция силы и скорости сокращения Суммация
• амплитуды сокращения – после первого сокращения часть Са2+ не успевает возвратиться в СПР (движение против градиента концентраций требует АТФ) и суммируется с вновь поступившей порцией.
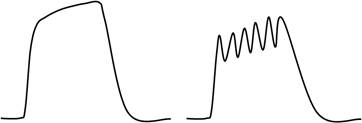
• Слитное сокращение – тетанус. – Гладкий – новая фаза укорочения накладывается на предыдущую. – Зубчатый – новая фаза укорочения накладывается на фазу удлинения. • В естественных условиях гладкий тетанус целой мышцы возникает за счет несинхронности зубчатых тетанусов отдельных ДЕ.
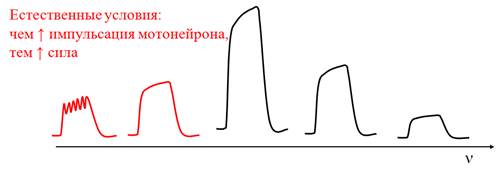
• Так как возврат Са2+ медленнее его выхода, чем частота возбуждения, тем амплитуда и сила сокращения; • Но небезгранично: имеется оптимум частоты возбуждения, после которого развивается пессимальное торможение (пессимум).
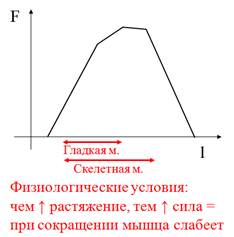
Зависимость длина-сила (зависимость Франка-Старлинга)
Зависимость длина-сила (зависимость Франка-Старлинга) - зависимость силы мышцы от степени ее растяжения ¯ силы при больших длинах: • ¯ перекрывания нитей актина и миозина ¯ силы при малых длинах: • ¯ электромеханического сопряжения; • “сморщивание” саркомера
Режимы сокращений • Изотонический – при постоянном напряжении • Изометрический – при постоянной длине (без укорочения) – максимальная сила
• Концентрический – усилие при укорочении • Эксцентрический – усилие при удлинении
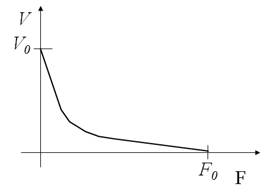
Зависимость нагрузка-скорость (сила-скорость)
Чем больше нагрузка, тем медленнее сокращение. Чем быстрее сокращение, тем оно слабее. Причины: • Длительность актомиозинового взаимодействия ~ сила. • При большой скорости укорочения поперечные мостики не успевают распадаться.
• F0 (изометрическая сила) зависит от количества поперечных мостиков (определяется длиной саркомера и количеством вышедшего Са2+). • V0 (cкорость при нулевой нагрузке) зависит от скорости оборота поперечных мостиков и гидролиза АТФ (определяется типом волокон).
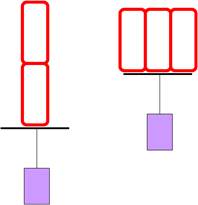
Последовательное и параллельное соединение саркомеров (волокон)
• Параллельное соединение (толстые мышцы) увеличивает силу • Последовательное соединение (длинные мышцы) - скорость
Регуляция силы и скорости мышечных сокращений – выводы: Скорость сокращениязависит от • скорости оборота поперечных мостиков и активности АТФазы миозина • нагрузки – зависимость нагрузка-скорость • числа активных ДЕ (при числа ДЕ нагрузка на одно волокно ¯) – зависимость нагрузка-скорость • анатомической длины мышцы (числа последовательно соединенных саркомеров) Сила сокращениязависит от • степени растяжения мышцы – зависимость длина-сила • скорости укорочения – зависимость нагрузка-скорость • частоты импульсации мотонейрона – суммация сокращений • числа активных ДЕ – нагрузка на одно волокно • толщины мышц (волокон).
Дата добавления: 2015-12-15 | Просмотры: 734 | Нарушение авторских прав |