|
АкушерствоАнатомияАнестезиологияВакцинопрофилактикаВалеологияВетеринарияГигиенаЗаболеванияИммунологияКардиологияНеврологияНефрологияОнкологияОториноларингологияОфтальмологияПаразитологияПедиатрияПервая помощьПсихиатрияПульмонологияРеанимацияРевматологияСтоматологияТерапияТоксикологияТравматологияУрологияФармакологияФармацевтикаФизиотерапияФтизиатрияХирургияЭндокринологияЭпидемиология |
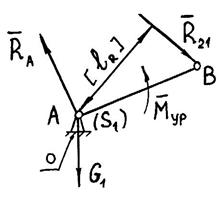
Розрахункова схема механізму 1-го класу
Мал. 3.7
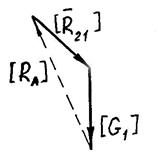
План сил для вхідної ланки
Мал. 3.8
Рішення а)Визначають реакцію в КП А. Для цього складають векторне рівняння åF(1) = 0 для першої ланки;
де двома лініями підкреслені відомі по розміру і напрямку сили. Для рішення рівняння будують план сил (мал.3.8) із масштабним коефіцієнтом mF (3.10), із якого визначають розмір реакції RA
і її напрямок. б) Знаходять врівноважуючий момент, прикладений до вхідної ланки. Для цього складають рівняння моментів åMA(1) = 0 відносно КП А.
де З рівняння (3.27) визначають врівноважуючий момент
3.4. Обчислення приведеного до вхідної ланки моменту сил опору. Для рішення задачі синтезу механізму, тобто визначення параметрів маховика, необхідно побудувати графіки зміни приведених до вхідної ланки моментів сил опору і моменту інерції роботи рушійних сил і сил корисного опору збільшення кінематичної енергії і діаграму Вітенбауера, що служить підставою для вибору параметрів маховика. При дослідженні руху механізму, що знаходиться під дією заданих сил, зручно всі сили опору, що діють на ланки механізму, замінити в загальному випадку силою і моментом, прикладеним до однієї ланки механізму - ланки приведення, до якого прикладається і рушійна сила, і визначити приведені силу і момент сил. Для визначення приведених сил і моменту сил, як відомо [2, 3], використовується рівність потужностей, що розвиваються силами Fi, прикладеними до i-тих ланок механізму і приведеними силою Fпр і моментом сил Мпр, прикладеними до ланки приведення і що обчисляються по формулах
де сила, прикладена до i- тої ланки, Mi- момент сил прикладений до i– тої ланки, V- швидкість центру мас i-тoї ланки, w - кутова швидкість i-тoї ланки, Vпр - швидкість ланки приведення, що рухається поступально, wпр - кутова швидкість ланки приведення. У більшості механізмів у якості ланки приведення приймають кривошип, який обертально рухається. Тому для визначення приведеного моменту сил, що діє на ланку приведення, користуються формулою (3.30). Силами опору в механізмах, приведених у завданнях на курсовий проект, є або сили від тиску рідини і газу, або сили різання, або сили ваги робочого тіла і сили опору його переміщенню й ін. У залежності від навантажувальної діаграми, що приведена у вихідних даних на проект, сили корисного опору будуть діяти не у всіх 12-ти положеннях кривошипа, і в окремих положеннях механізму вони будуть рівні нулю. Тому студент повинний уважно ознайомитися з навантажувальною діаграмою. Результати розрахунку приведеного моменту сил опору по формулі (3.30) для 12-ти положень механізму зводять у табл.3.1. Таблиця 3.1 Значення приведеного моменту
Використовуючи значення Мпр з табл.3.1 за допомогою попередньо обраних масштабних коефіцієнтів приведеного моменту mМ і кута повороту кривошипа mj будують графічну залежність Мпр(j); для чого обчисляють зображення приведеного моменту і кута повороту для кожного положення механізму
По осі абсцис відкладають 12 відрізків
3.5.Обчислення приведеного до вхідної ланки моменту інерції. Як відомо [2,3], приведення моментів інерції окремих ланок механізму до ланки приведення припускає рівність кінетичної енергії
де n - число ланок механізму; Jn - приведений (до ланки приведення) момент інерції; wпр - кутова швидкість ланки приведення.
У випадку плоскопаралельного руху і-тої ланки її кінетична енергія визначається:
де m - маса i-тої ланки; VSi - швидкість центру мас i-тої ланки (визначають із плану швидкостей); JSi - момент інерції i-тої ланки щодо центральної осі, перпендикулярної площини руху (для однорідної ланки, виконаного у виді стержня довжиною З формули (3.32) визначають Jn, підставивши в її ліву частину вираз для Ei (3.33)
де Ui - передатне відношення між i-тою ланкою і ланкою приведення. У формулі (3.34) враховується момент інерції приводного двигуна
де Up - передатне число редуктора. Результати розрахунку приведеного моменту інерції механізму для 12-ти положень механізму зводять у табл.3.2. Таблиця 3.2 Дата добавления: 2015-11-26 | Просмотры: 616 | Нарушение авторских прав |
 (3.25)
(3.25) (3.26)
(3.26) (3.27)
(3.27) - плече сили.
- плече сили. (3.28)
(3.28)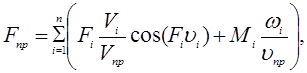 (3.29)
(3.29) (3.30)
(3.30) та
та  (3.31)
(3.31) , які у сумі визначають поворот кривошипа на 3600, а по осі ординат - із табл.3.1 відповідні положенню кривошипа значення
, які у сумі визначають поворот кривошипа на 3600, а по осі ординат - із табл.3.1 відповідні положенню кривошипа значення  . При цьому позитивні значення Мпр відкладають вище по осі абсцис, а негативні - нижче. Рушійні сили прикладають до ланки приведення і приймають постійними протягом усього циклу. Отже, постійним буде і момент Мд рушійних сил (рушійний момент), розмір якого може бути знайден з умови рівності за цикл роботи сил опору Ас і рушійних сил Ад (3.6 п.5).
. При цьому позитивні значення Мпр відкладають вище по осі абсцис, а негативні - нижче. Рушійні сили прикладають до ланки приведення і приймають постійними протягом усього циклу. Отже, постійним буде і момент Мд рушійних сил (рушійний момент), розмір якого може бути знайден з умови рівності за цикл роботи сил опору Ас і рушійних сил Ад (3.6 п.5). i-тих ланок у заданому положенні й умовної кінетичної енергії, якою володіє ланка приведення в тому ж положенні і для ланки приведення, що рухається обертально, ця рівність має вигляд
i-тих ланок у заданому положенні й умовної кінетичної енергії, якою володіє ланка приведення в тому ж положенні і для ланки приведення, що рухається обертально, ця рівність має вигляд (3.32)
(3.32) ,(3.33)
,(3.33) ; wi- кутова швидкість i-тої ланки (визначають при кінематичному аналізі механізму).
; wi- кутова швидкість i-тої ланки (визначають при кінематичному аналізі механізму). (3.34)
(3.34) (3.35)
(3.35)