|
АкушерствоАнатомияАнестезиологияВакцинопрофилактикаВалеологияВетеринарияГигиенаЗаболеванияИммунологияКардиологияНеврологияНефрологияОнкологияОториноларингологияОфтальмологияПаразитологияПедиатрияПервая помощьПсихиатрияПульмонологияРеанимацияРевматологияСтоматологияТерапияТоксикологияТравматологияУрологияФармакологияФармацевтикаФизиотерапияФтизиатрияХирургияЭндокринологияЭпидемиология |
Динамічний аналіз кулачкового механізму з хитним коромислом
Мал. 4.5
- через крайні точки L1, L2,…, Lі,…, L13 проводять прямі під мінімально припустимим рогом передачі прямування LO1O2 =O1O2 × ms (4.18) Довжина мінімального радіуса кулачка визначається відрізком DCo. При цьому відстань L між центрами обертання кулачка і коромисла буде дорівн
L = LO2 × ms (4.19)
4.5. Кінематичний аналіз кулачкового механізму
Проектування профілю кулачка при заданих вихідних даних здійснюють методом обертання механізму. За допомогою цього методу розглядають прямування штовхача (коромисла) навколо умовно загальмованого кулачка. а) Кулачковий механізм із штовхачем, що зворотно-поступально рухається, (мал.4.1 а) Для проектування профілю кулачка необхідно знати закон прямування штовхача S(j) у виді діаграми (мал.4.6 а), мінімальний радіус кулачка r0, ексцентриситет штовхача е. Порядок проектування (мал.4.6 б): - через довільну точку A0 проводять вертикаль A0F - траєкторію штовхача, на котрої нижче точки A0 вибирають точку B0 - центр ролика штовхача; - зліва від прямої A0F на відстані Точка О є центром обертання кулачка: - із центру О радіусами [ - окружність радіуса [ - у точках C1, C2, C3,... кінців цих ділянок проводять дотичні до окружності, що визначають положення осі штовхача для кожного рогу повороту j зверненого механізму; - від точок B1¢, B2¢, B3¢,... перетинання цих дотичних з окружністю радіуса OB0 відкладають відрізки S1, S2, S3,.... узяті з діаграми переміщень кулачка (мал.4.6 б). Одержують точки B1, B2, B3,... центрового профілю, що з'єднують за допомогою лекала плавної кривої; - визначають радіус ролика rp [rp] = б) Кулачковий механізм із хитним коромислом (мал.4.1 в) Для проектування профілю кулачка необхідно знати закон прямування коромисла y(j) у виді діаграми (мал.4.7 а), мінімальний радіус кулачка ro, довжину коромисла Порядок проектування (мал.4.7 б): - із довільно розташованої точки O1 (вісь кулачка) проводять дві окружності: А - радіусом [ro]= - дугою SR радіуса [ - від прямої O1O2 в напрямку обертання кулачка послідовно відкладають задані фазові роги jP, jBB, jO; - розбивають роги jP і jO променями на роги, що відповідають положенням кулачка (діаграма мал. 4.7 а), і на окружності С одержують точки B1¢, B2¢,...; із точок B1¢, B2¢, … проводять дуги радіусами [ - з'єднують за допомогою лекала і циркуля плавної кривої точки B1¢, B2¢,... і одержують теоретичний профіль кулачка; - визначають радіус ролика rp< (0,4 - із точок B1², B2², ….. проводять окружність радіусом [ rp ]= - будують що обгинає отриманих окружностей, що є практичним профілем кулачка. Дата добавления: 2015-11-26 | Просмотры: 547 | Нарушение авторских прав |
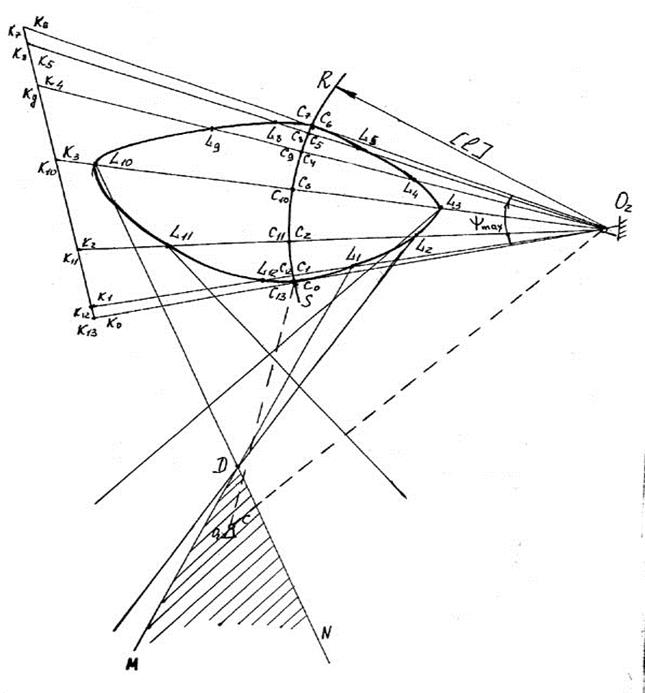
 = 90o -
= 90o -  до даних відрізків. Будують що обгинає криву MDN, що визначає область центру кулачка. З достатньою точністю можна вважати що ця область розташовується між прямими, що мають щонайнижчу точку перетинання D (заштрихована область на мал.4.5). Обране в цій області положення центру O1 обертання кулачка визначає шуканий початковий радіус ro = O1C0 × ms і відстань LO1O2 між центрами обертання кулачка і коромисла.
до даних відрізків. Будують що обгинає криву MDN, що визначає область центру кулачка. З достатньою точністю можна вважати що ця область розташовується між прямими, що мають щонайнижчу точку перетинання D (заштрихована область на мал.4.5). Обране в цій області положення центру O1 обертання кулачка визначає шуканий початковий радіус ro = O1C0 × ms і відстань LO1O2 між центрами обертання кулачка і коромисла. =
=  , обумовленій ексцентриситетом e, проводять пряму OE//A0F. На цієї прямої з центру B0 дугою радіуса B0O=[r0]=
, обумовленій ексцентриситетом e, проводять пряму OE//A0F. На цієї прямої з центру B0 дугою радіуса B0O=[r0]=  роблять зарубку.
роблять зарубку. (0,4
(0,4  0,5)r0 і будують профіль кулачка еквидистантно кривої центрового профілю на відстані
0,5)r0 і будують профіль кулачка еквидистантно кривої центрового профілю на відстані
 і С - радіусом O1O2;
і С - радіусом O1O2; з центру обертання коромисла довільно прийнятого на окружності С, роблять зарубку на окружності А. Отримана точка Bo визначає саме близьке положення коромисла до центру кулачка. Розмічають дугу SR - траєкторію прямування центру ролика - відповідно до діаграми прямування (мал.4.7 а) на ділянці BoB5 (див.п.4.4);
з центру обертання коромисла довільно прийнятого на окружності С, роблять зарубку на окружності А. Отримана точка Bo визначає саме близьке положення коромисла до центру кулачка. Розмічають дугу SR - траєкторію прямування центру ролика - відповідно до діаграми прямування (мал.4.7 а) на ділянці BoB5 (див.п.4.4);